02
Research
DRACO 4
Next-Generation Humanoid — Human Centered Robotics LabDrag to rotate · Pinch or scroll to zoom
Development of a full-sized humanoid from the ground up. I'm doing everything—mechanical design, hardware integration, ROS2/EtherCAT communication stack, and RL-based morphology optimization in Isaac Lab.
RL
Isaac Lab
ROS2
EtherCAT
SolidWorks
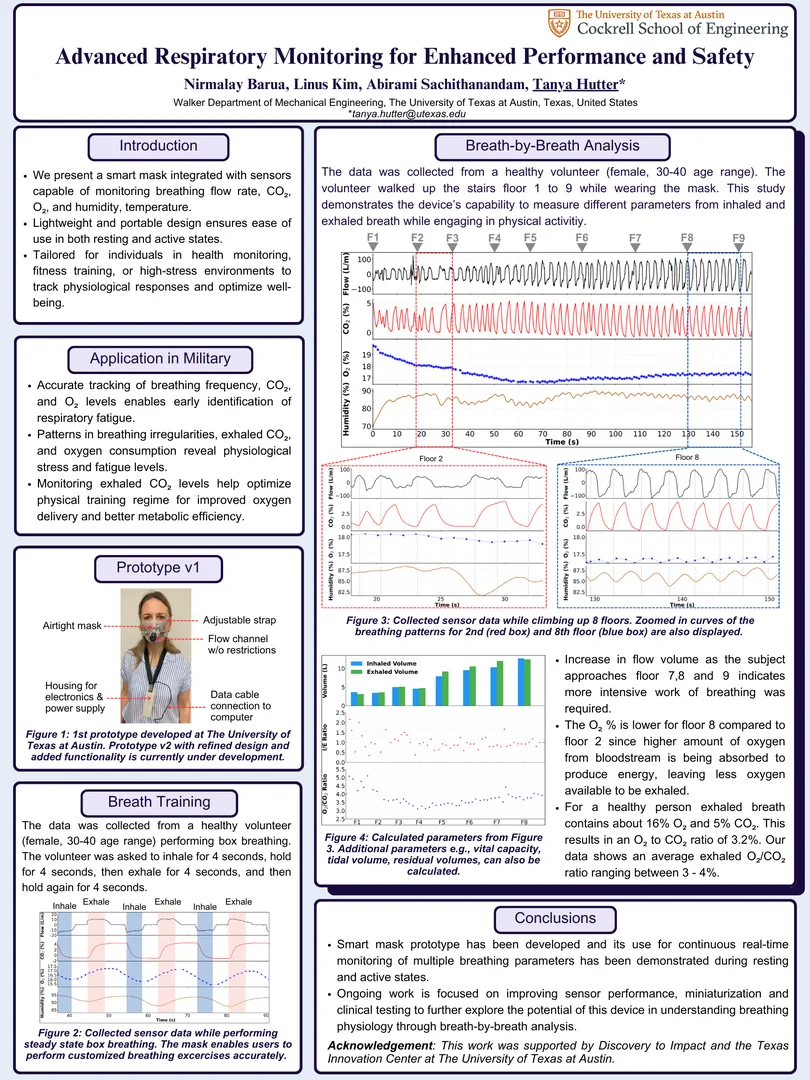
BreathIQ
Multi-sensor respiratory monitoring device for COPD patients. Ran PCA on 50+ patient datasets and built a Python UI for real-time data collection.
Medical DevicePCAPython
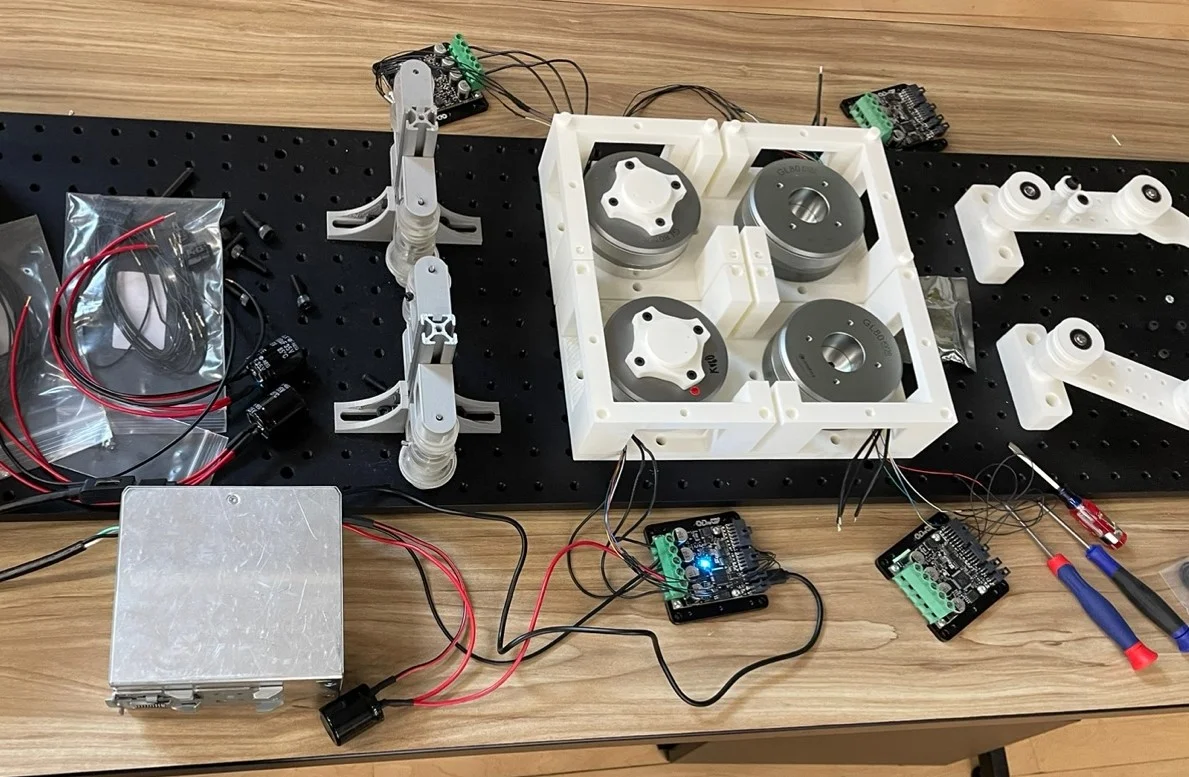
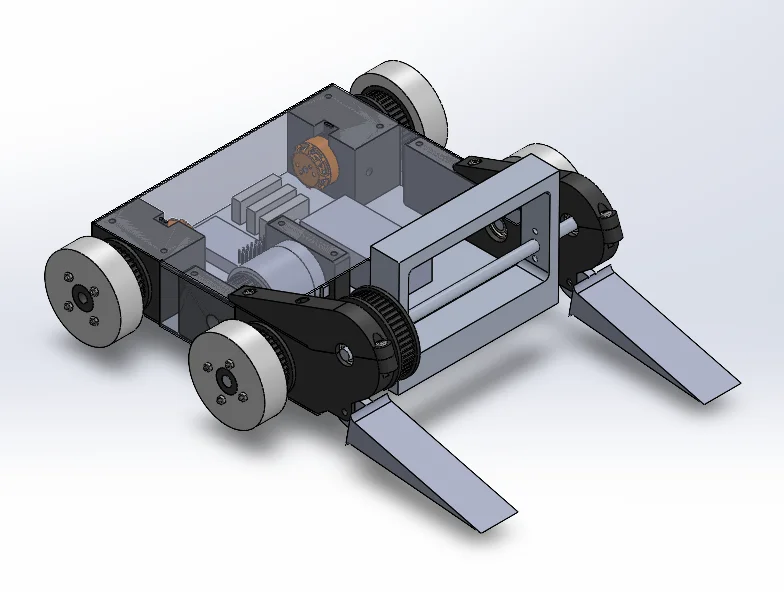
NeuFinger
Cable-driven robotic finger platform for sensorless force estimation research. Built a 4 DOF system and designed the tensioner mechanisms.
Cable ActuationForce Estimation